

VectorNav VN-200 Inertial Navigation System interface. More...
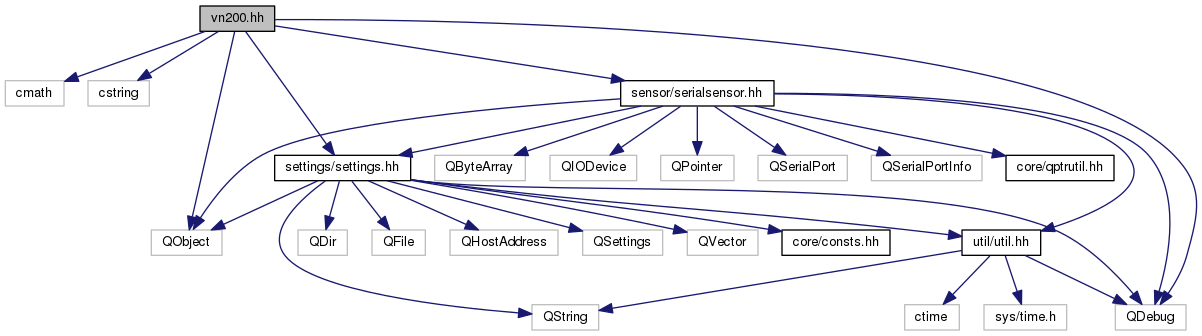
#include <cmath>#include <cstring>#include <QDebug>#include <QObject>#include "sensor/serialsensor.hh"#include "settings/settings.hh"
Include dependency graph for vn200.hh:
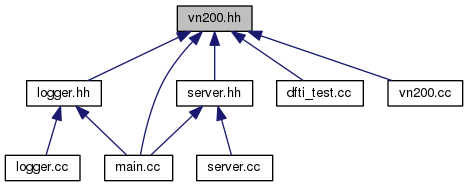
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | dfti::VN200Data |
| Structure to hold VN-200 data. More... | |
| class | dfti::VN200 |
| Serial driver to acquire data from a VN-200 Inertial Navigation System. More... | |
Functions | |
| bool | dfti::validateVN200Checksum (QByteArray pkt) |
| Validate the VN-200 packet checksum. More... | |
Detailed Description
VectorNav VN-200 Inertial Navigation System interface.
- Copyright
- Copyright © 2016-2017 Vehicle Systems & Control Laboratory, Department of Aerospace Engineering, Texas A&M University
- License
- BSD 2-Clause License
Function Documentation
| bool dfti::validateVN200Checksum | ( | QByteArray | pkt | ) |
Validate the VN-200 packet checksum.
The checksum is a CRC 16; if the checksum byte is included the checksum should evaluate to 0.
- Parameters
-
pkt A full VN-200 packet to validate.
- Returns
- True if the packet checksum is correct.
